- Solutions


- Use cases
- { Documentation }
- Resources
- Company
- Solutions
- Industries
- Use cases
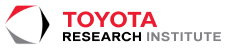
The exact data your model needs
Empowering engineers to generate cutting edge human-centric synthetic data for computer vision



Trusted By





Better models, faster time to production




The power of our synthetic data

>90%
Less real data required
>10%
Improvement in model accuracy
2x
Time
to productionGet started with Datagen

Quick start API
Get in touch
Docs
- Use cases
- Industries
- Solutions
- Company



- Resources
- { Documentation }